Sometimes we encounter situations where there is an object moving about an axis. The simplest method to handle these cases is to introduce a circular coordinate system
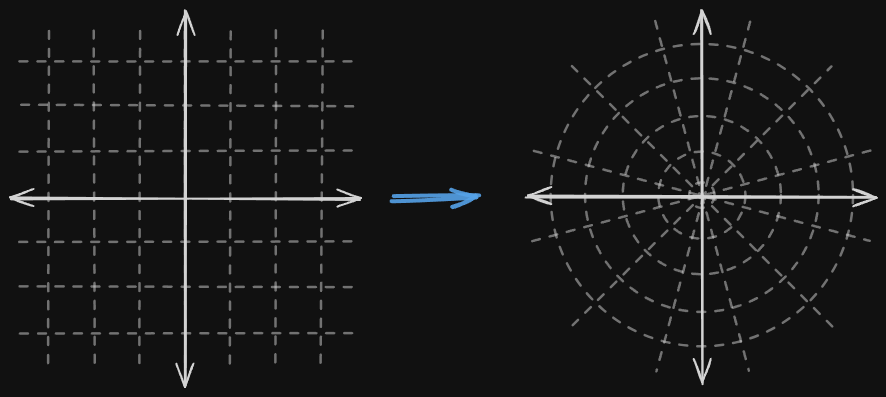
We turn our rectangular coordinate system using an
So a vector in polar coordinates will be described as
Note how
Some variables:
Angular velocity is also denoted
Since
This makes sense. Imagine two points on a spinning record, one closer to the center of the record and one farther. Even though entire record has the same angular velocity and acceleration, the point at the center of the record moves a smaller distance in the same amount of time as the point farther from the center. So the point closer to the center has a smaller velocity because its distance from the center is smaller.
However, this is only the case for a pure angular acceleration and velocity. If we introduce a radial velocity and acceleration, we get much more complicated equations.
The derivation is as follows. For velocity,
Since
So,
For acceleration,
Since
So,
Notice how in both equation, if we keep
The radial part of the acceleration is called Centripetal Acceleration.
From our equation for acceleration we can find force in polar coordinates.
We can relate the frequency as angular velocity over distance:
For constant and purely angular values, we can use angular Kinematic Equations:
Torque is a Force about an axis.
Moment of Inertia is the rotation equivalent of mass.